Advanced Robotics & AI
Deploy IoT Devices with Intelligent Robotics
A comprehensive robotics system designed for deploying IoT devices in challenging environments. Built with real-time path planning, inverse kinematics control, and advanced Gazebo simulation for optimized autonomous navigation.
Simulation in Action
Key Technologies
Leveraging cutting-edge frameworks and simulation tools
MoveIt Framework
Collision-free path planning using set_pose_target() and RRT-based planners with automatic re-planning on environmental changes
Reinforcement Learning
RL algorithms optimized for real-world IoT deployment and autonomous navigation in hard-to-access areas
Inverse Kinematics & Control
6-joint trajectory solver with follow_joint_trajectory controller and real-time state feedback adjustment
ROS Integration
Complete ROS middleware stack for joint state monitoring, trajectory execution, and dynamic control loops
Gazebo Simulation
Factory-realistic physics simulation with custom STL environment models and collision detection validation
RViz Visualization
3D debugging and visualization of collision avoidance, joint angles, and trajectory planning in real-time
Real-Time Path Planning with Obstacle Avoidance
I leveraged MoveIt's Python API to define the robot's target positions and generate paths that avoided obstacles in the environment. The robot would take in a 3D target pose (via set_pose_target()), and MoveIt would plan a smooth, collision-free path to that pose using its built-in planners. If the environment changed mid-task (say, a box got in the way), MoveIt automatically recalculated a new path.
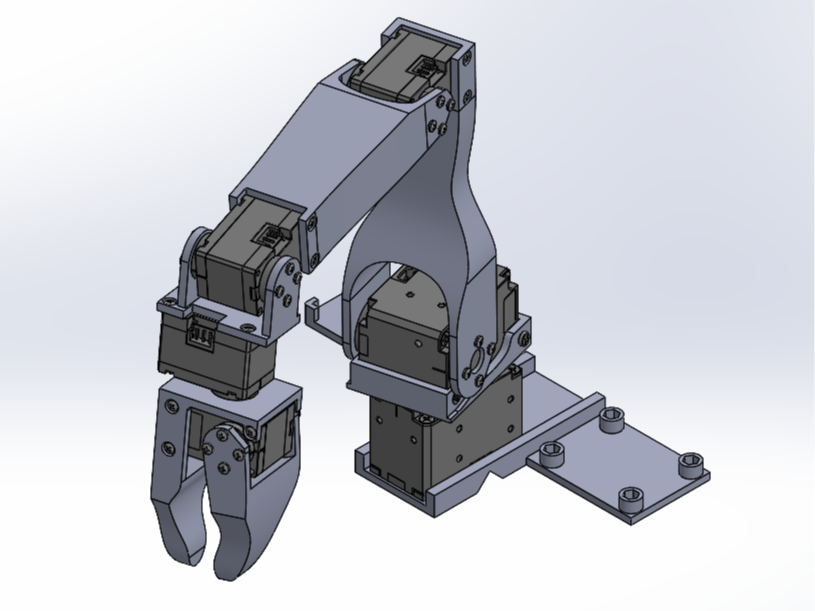
Hardware Setup
Custom-built robotic arm with 6 degrees of freedom, servo motors, and precision control systems

Custom 6-DOF Robotic Arm
Custom-engineered with high-precision servo motors and mechanical components. Achieves 0.5° joint accuracy through advanced control systems and real-time feedback mechanisms.
Real-Time ROS Control Stack
Full ROS integration with joint state feedback, follow_joint_trajectory control, and MoveIt inverse kinematics solver for smooth, collision-free trajectories.
Hard-to-Access IoT Deployment
Purpose-built for autonomous navigation in challenging environments. Combines reinforcement learning optimization with validated Gazebo simulation for reliable real-world deployment.
Performance Metrics
Degrees of Freedom
Full spatial manipulation capability
Path Planning Speed
Real-time obstacle avoidance
Joint Accuracy
Precision servo control
Control Frequency
Real-time feedback loop